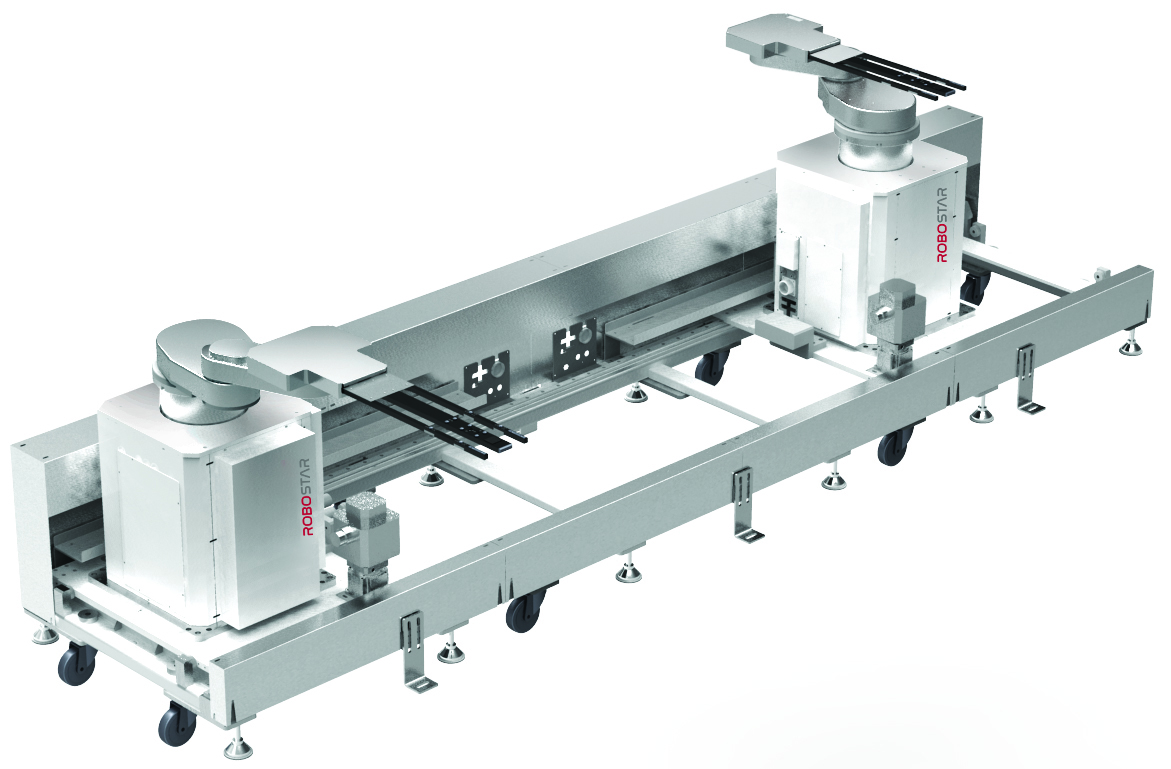
2G용
2G Glass (370X470) 대응 Robot으로 반도체 및 디스플레이 제조 공정에서 유리 기판 (Glass Substrate)의 이동 및 처리에 사용됩니다. 유리 기판의 안전하고 정확한 핸들링을 담당하며 공정에서 유리 기판의 이송, 로딩/언로딩, 정렬 등을 수행합니다.
- 주요 구성 : 고객사 협의
- 정밀도 : ±0.15mm
- 청정도 : Class10 ( 0.1 ㎛ )
- Arm Type : Link 방식
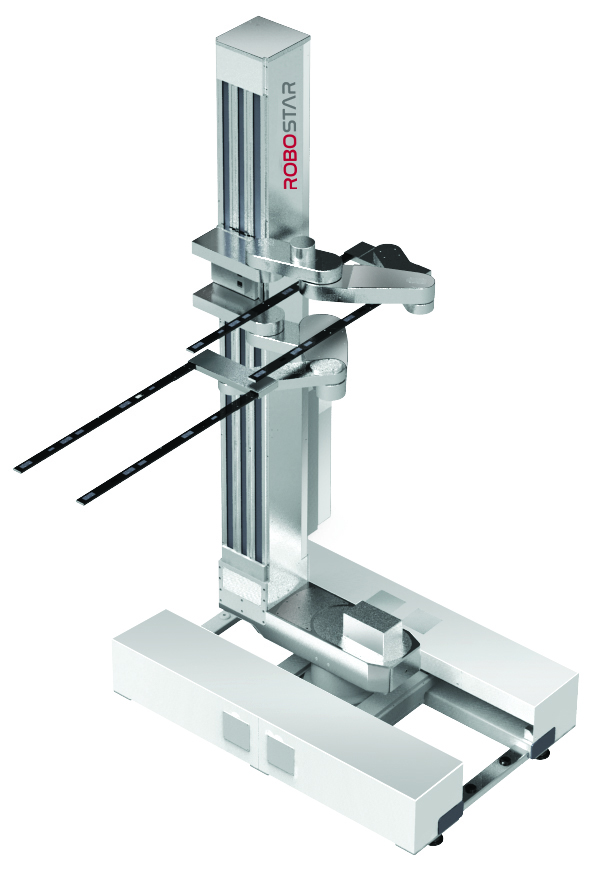
3G용
3G Glass (550X650) 대응 Robot으로 반도체 및 디스플레이 제조 공정에서 유리 기판 (Glass Substrate)의 이동 및 처리에 사용됩니다. 유리 기판의 안전하고 정확한 핸들링을 담당하며 공정에서 유리 기판의 이송, 로딩/언로딩, 정렬 등을 수행합니다.
- 주요 구성 : 고객사 협의
- 정밀도 : ±0.2mm
- 청정도 : Class10 ( 0.1 ㎛ )
- Arm Type : Link 방식
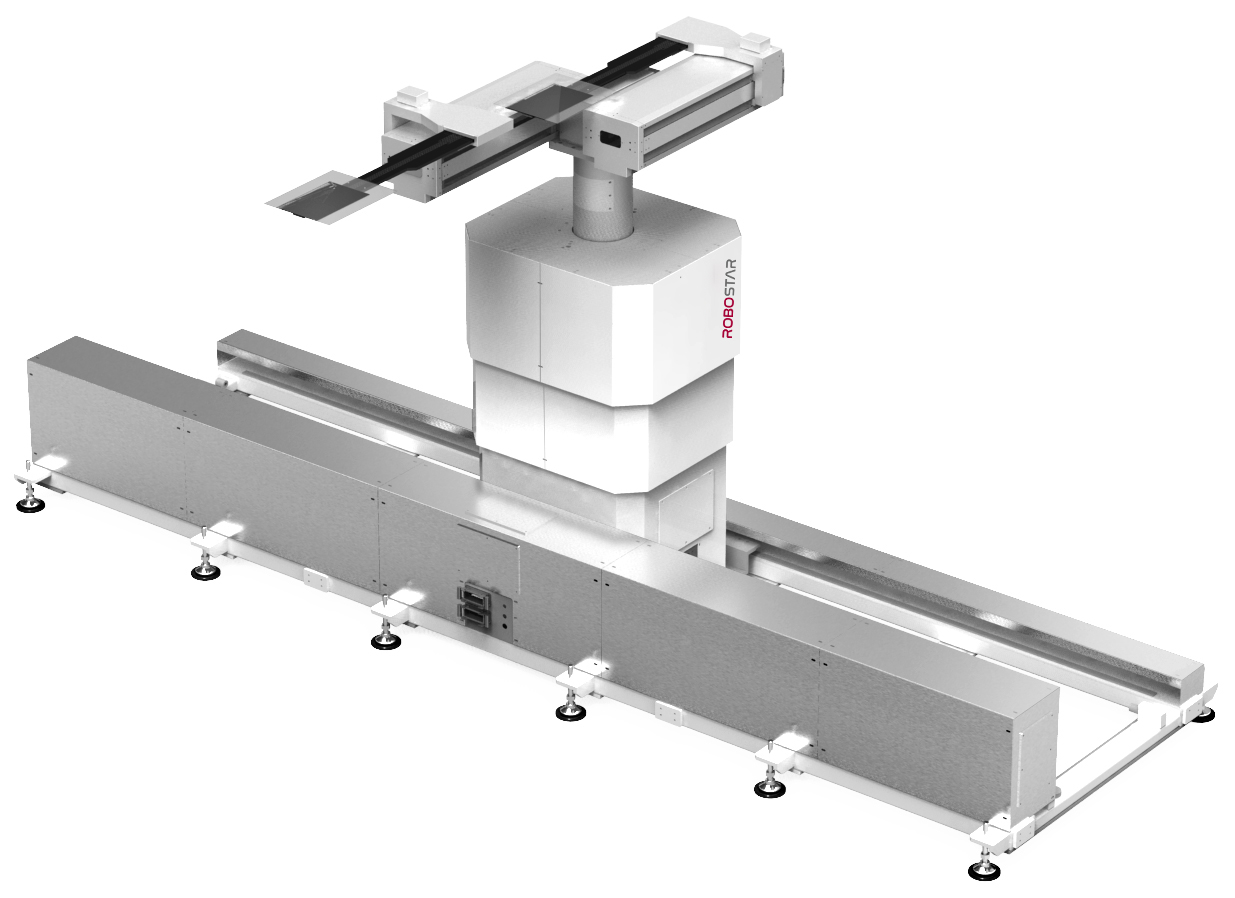
4G용
4G Glass (730X920) 대응 Robot으로 반도체 및 디스플레이 제조 공정에서 유리 기판 (Glass Substrate)의 이동 및 처리에 사용됩니다. 유리 기판의 안전하고 정확한 핸들링을 담당하며 공정에서 유리 기판의 이송, 로딩/언로딩, 정렬 등을 수행합니다.
- 주요 구성 : 고객사 협의
- 정밀도 : ±0.2mm
- 청정도 : Class10 ( 0.1 ㎛ )
- Arm Type : Slide 방식
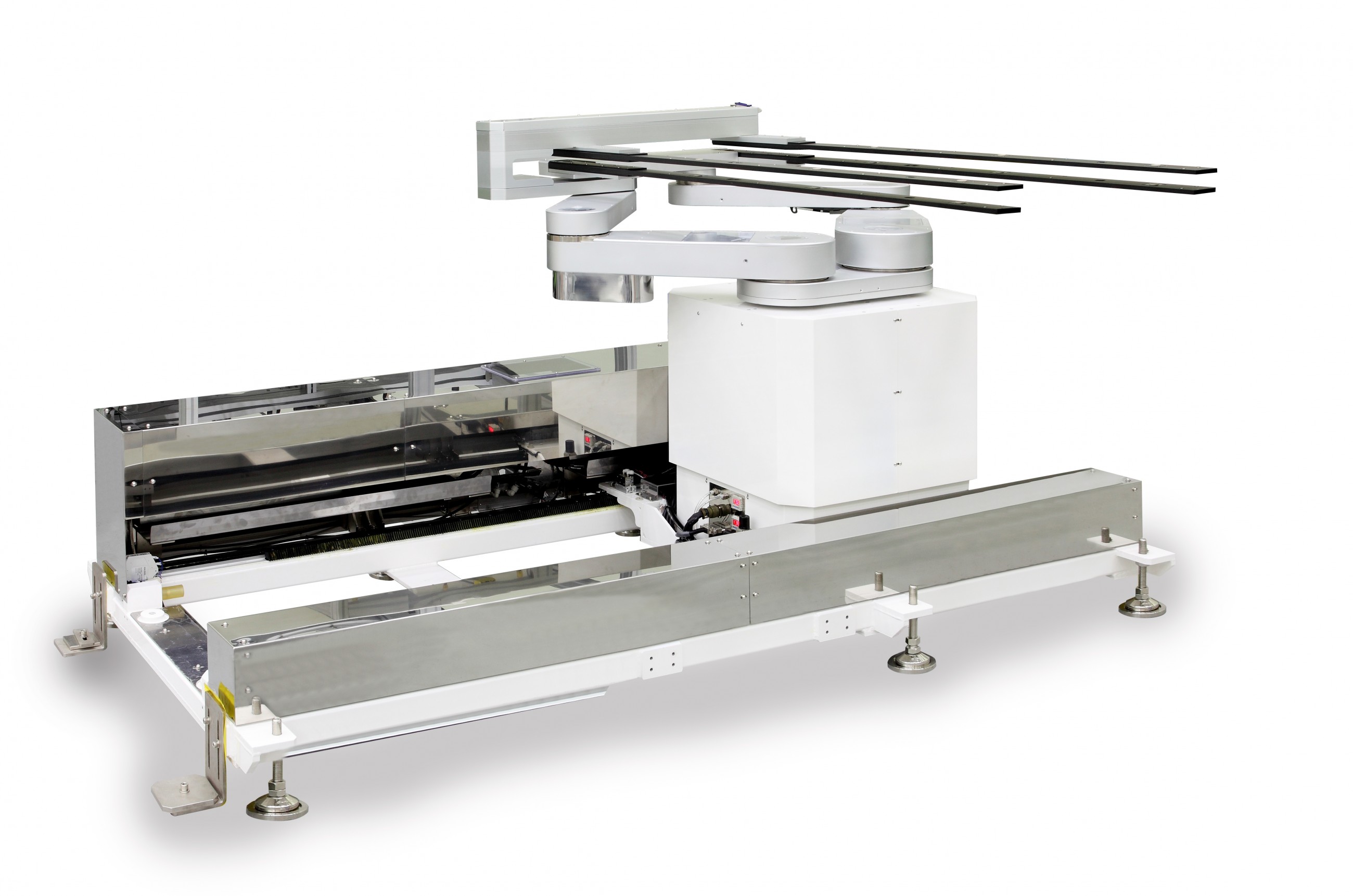
5G용
5G Glass (1100X1250) 대응 Robot으로 반도체 및 디스플레이 제조 공정에서 유리 기판 (Glass Substrate)의 이동 및 처리에 사용됩니다. 유리 기판의 안전하고 정확한 핸들링을 담당하며 공정에서 유리 기판의 이송, 로딩/언로딩, 정렬 등을 수행합니다.
- 주요 구성 : 고객사 협의
- 정밀도 : ±0.2mm
- 청정도 : Class10 ( 0.1 ㎛ )
- Arm Type : Slide 방식
6G용
6G Glass (1500X1850) 대응 Robot으로 반도체 및 디스플레이 제조 공정에서 유리 기판 (Glass Substrate)의 이동 및 처리에 사용됩니다. 유리 기판의 안전하고 정확한 핸들링을 담당하며 공정에서 유리 기판의 이송, 로딩/언로딩, 정렬 등을 수행합니다.
- 주요 구성 : 고객사 협의
- 정밀도 : ±0.2mm
- 청정도 : Class10 ( 0.1 ㎛ )
- Arm Type : Link 방식

7G용
7G Glass (1870X2000) 대응 Robot으로 반도체 및 디스플레이 제조 공정에서 유리 기판 (Glass Substrate)의 이동 및 처리에 사용됩니다. 유리 기판의 안전하고 정확한 핸들링을 담당하며 공정에서 유리 기판의 이송, 로딩/언로딩, 정렬 등을 수행합니다.
- 주요 구성 : 고객사 협의
- 정밀도 : ±0.2mm
- 청정도 : Class10 ( 0.1 ㎛ )
- Arm Type : Slide 방식