Product
전자/전기
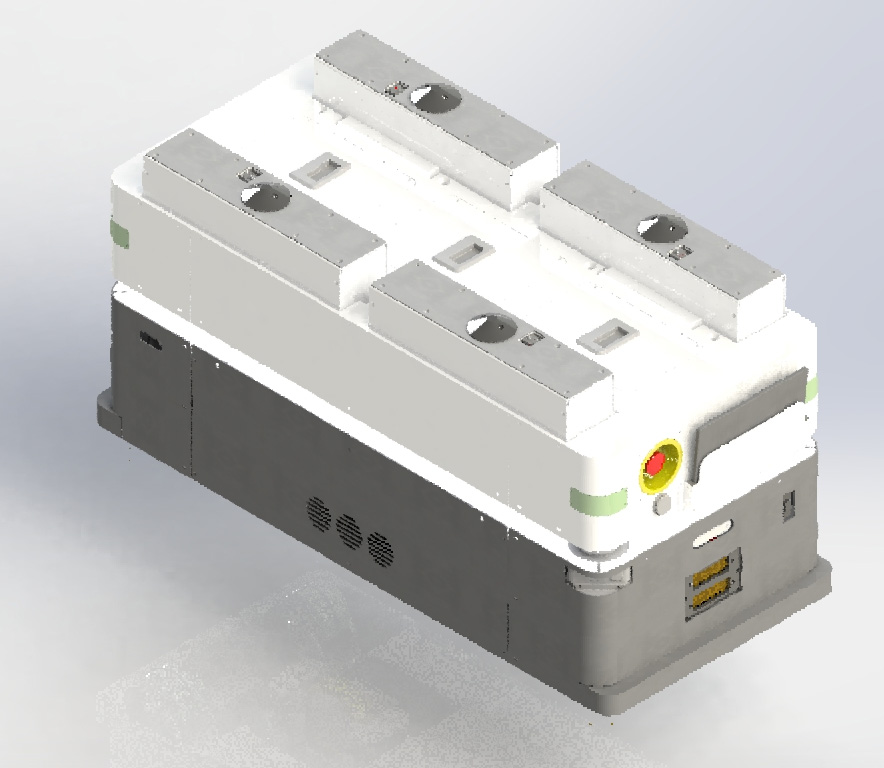
AGV/AMR
AGV/AMR
- 정확도와 신뢰성을 기반으로 한 Customizing AGV System
- 현장 작업자 사용이 용이한 User Interface 설계
- 생산 관리 시스템 연동
- 자율 충전 및 AGV 다중 제어 구현

Features
- - 반복적인 물류 이동의 효율적 대체 가능
- - 유연한 시스템 운용으로 실시간 물류 흐름의 제어 및 정확한 물류 이송
- - 물류 이송 인력의 감소 및 생산성 향상
- - 차상 장치 (이재장치)의 다양화로 작업 환경 쾌적함 추구
- - 3중 안전 장치를 통한 안전사고 예방
Related
Products
Specification
[유도 방식에 따른 분류]
1. MGV (Magnetic Guide Vehicle – 자기 가이드 운반차)
- 바닥에 자석을 매설 또는 자석 테이프를 부착하고 자석 가이드 센서를 이용하여 유도
- 바닥에 일정 구간마다 Spot(철판 , 자석)을 매설하고 가이드 센서를 이용하여 AGV 자세를 제어하며 유도
- 설치 및 운용이 간단하며, 공사비가 적게 드는 장점이 있다.
2. 광학유도 (Optical guidance)
- 바닥에 Color Tape or QR Code를 부착하고 PGV Sensor 를 이용하여 AGV 주행유도
- 고 정밀도, 교통통제 용이
3. LGV (Laser Guide Vehicle – 레이저 유도 운반차)
- 고휘도 Reflector 설치 후 Laser Scanner로 AGV의 절대 좌표를 이용하여 주행유도
- 고 정밀도 주행
- 주변 환경 어느 곳에서나 LGV가 인지할 반사 판이 부착되어 있다면 Track을 자유롭게 변경하여 증설 가능
4. SLAM(Simultaneous Localization And Mapping)
- 주위 지형지물 혹은 임의의 지형 물을 설치, Laser Distance를 이용하여 지형지물의 이미지를 인식하여 주행유도
- 시설물의 잦은 위치변경에도 새로운 Map 작성이 용이
[주행 방식에 따른 분류]
1. SD - Type (Single Driver_단일주행)
- 일반적 형태의 AGV 주행 방식
- 주행 및 조향 모터가 하나의 구성으로 조립(AGV 전용 휠)
- Guiding 기준이 주행부의 중심에 위치하며, 기준선에 따라 움직이는 제어
2. DD - Type (Dual Driver_복합주행)
- 두 개의 모터가 속도 차를 이용 한 조향 제어
- Spin-Turn 및 후진이 용이
- 고 하중 화물 핸들링에 안정적 구조
- 속도편차를 이용한 조향 구현으로 높은 조향 제어 기술 필요.일반적 형태의 AGV 주행 방식
3. QD - Type (Quad Driver_이중주행)
- 단일 주행(SE-Type) 모터를 전,후(좌,우) 배치하여 개별 주행
- 급커브 후 즉시 AGV가 화물을 이재 및 적재 할 수 있음
- 사행 주행 가능
- 최대 6,000Kg 적재 시 안정적 구조
- 이중 주행으로 높은 제어 기술 필요